נאָר לייענען דעם אַרטיקל SPI, I2C, UART, I2S, GPIO, SDIO, CAN
די ויטאָבוס שטענדיק סטאַק אין אים. די סיגנאַלז אין דער וועלט זענען אַלע די זעלבע, אָבער עס זענען טויזנטער פון בוסעס, וואָס איז אַ קאָפּווייטיק. אין אַלגעמיין, עס זענען דריי מינים פון בוסעס: ינערלעך ויטאָבוס, סיסטעם ויטאָבוס און פונדרויסנדיק ויטאָבוס. די ינערלעך ויטאָבוס איז די ויטאָבוס צווישן די פּעריפעראַל טשיפּס אין די מייקראָוקאַמפּיוטער און די פּראַסעסער, וואָס איז געניצט פֿאַר די ינטערקאַנעקשאַן אויף די שפּאָן מדרגה; בשעת די סיסטעם ויטאָבוס איז די ויטאָבוס צווישן די צאַפּן-אין באָרדז און די סיסטעם ברעט אין די מייקראָוקאַמפּיוטער, און איז געניצט פֿאַר די קעגנצייַטיק וועקסל אויף די צאַפּן-אין ברעט מדרגה. די פונדרויסנדיק ויטאָבוס איז די ויטאָבוס צווישן די מייקראָוקאַמפּיוטער און די פונדרויסנדיק מיטל. ווי אַ מיטל, די מייקראָוקאַמפּיוטער יקסטשיינדזשיז אינפֿאָרמאַציע און דאַטן מיט אנדערע דעוויסעס דורך די ויטאָבוס. עס איז געניצט פֿאַר ינטערקאַנעקשאַן אויף מיטל-מדרגה.
אין אַדישאַן צו די ויטאָבוס, עס זענען עטלעכע ינטערפייסיז, וואָס זענען אַ זאַמלונג פון קייפל בוסעס, אָדער זיי זענען נישט פארווארפן.
1. ספּי
SPI (סיריאַל פּעריפעראַל צובינד): די סינטשראָנאָוס סיריאַל ויטאָבוס אופֿן פארגעלייגט דורך מאָטאָראָלאַ. הויך-גיכקייַט סינטשראָנאָוס סיריאַל פּאָרט. 3 צו 4 דראָט צובינד, פרייַ שיקט און ריסיווינג, קענען זיין סינגקראַנייזד.
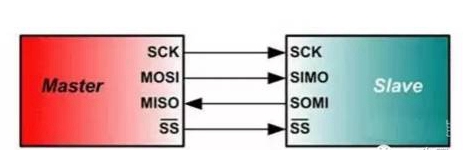
עס איז וויידלי געוויינט ווייַל פון זייַן שטאַרק ייַזנוואַרג פאַנגקשאַנז. אין די ינטעליגענט קיילע און מעאַסורעמענט און קאָנטראָל סיסטעם קאַמפּאָוזד פון איין שפּאָן מייקראָוקאַמפּיוטער. אויב די גיכקייַט פאָדערונג איז נישט הויך, די SPI ויטאָבוס מאָדע איז אַ גוטע ברירה. עס קענען שפּאָרן י / אָ פּאָרץ, פֿאַרבעסערן די נומער פון פּעריפעראַלס און די פאָרשטעלונג פון די סיסטעם. דער נאָרמאַל ספּי ויטאָבוס באשטייט פון פיר שורות: סיריאַל זייגער ליניע (SCK), בעל אַרייַנשרייַב / שקלאַף רעזולטאַט ליניע (מיסאָ). בעל רעזולטאַט / שקלאַף ינפּוט שורה (MOSI) און שפּאָן סעלעקטירן סיגנאַל (CS). עטלעכע SPI צובינד טשיפּס האָבן יבעררייַסן סיגנאַל שורות אָדער טאָן ניט האָבן MOSI.
די SPI ויטאָבוס באשטייט פון דריי סיגנאַל שורות: סיריאַל זייגער (SCLK), סיריאַל דאַטן רעזולטאַט (SDO) און סיריאַל דאַטן אַרייַנשרייַב (SDI). די SPI ויטאָבוס קענען פאַרשטיין די ינטערקאַנעקשאַן פון קייפל ספּי דעוויסעס. די SPI מיטל וואָס גיט די SPI סיריאַל זייגער איז אַ SPI בעל אָדער בעל מיטל (Master), און אנדערע דעוויסעס זענען SPI סלאַוועס אָדער שקלאַף דעוויסעס (Slave). גאַנץ-דופּלעקס קאָמוניקאַציע קענען זיין איינגעזען צווישן בעל און שקלאַף דעוויסעס. אויב עס זענען קייפל שקלאַף דעוויסעס, איר קענען לייגן אַ סעלעקציע שורה פֿאַר שקלאַף מיטל. אויב איר נוצן אַ וניווערסאַל IO פּאָרט צו סימולירן ספּי ויטאָבוס, איר מוזן האָבן אַ רעזולטאַט פּאָרט (SDO), אַ אַרייַנשרייַב פּאָרט (SDI), און די אנדערע פּאָרט דעפּענדס אויף די טיפּ פון ימפּלאַמענאַד מיטל. אויב איר ווילן צו ינסטרומענט אַ בעל-שקלאַף מיטל, איר דאַרפֿן אַ אַרייַנשרייַב און רעזולטאַט פּאָרט. , אויב נאָר דער בעל מיטל איז איינגעזען, דער רעזולטאַט פּאָרט איז גענוג; אויב נאָר דער שקלאַף מיטל איז איינגעזען, נאָר די אַרייַנשרייַב פּאָרט איז פארלאנגט.
2. י 2 ק
I2C (ינטער-ינטעגראַטעד קרייַז): א צוויי-דראָט סיריאַל ויטאָבוס דעוועלאָפּעד דורך פיליפּס, געניצט צו פאַרבינדן מיקראָ קאַנטראָולערז און זייער פּעריפעראַל דעוויסעס.
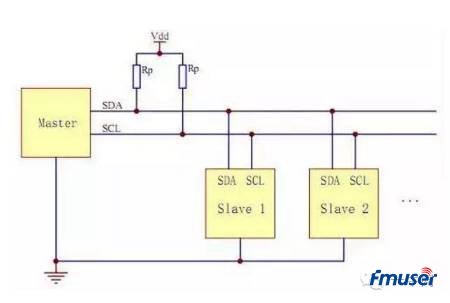
די I2C ויטאָבוס ניצט צוויי ווירעס (SDA און SCL) צו אַריבערפירן אינפֿאָרמאַציע צווישן די ויטאָבוס און די מיטל, סיריאַל קאָמוניקאַציע צווישן די מיקראָ קאַנטראָולער און פונדרויסנדיק דעוויסעס, אָדער צוויי-וועג דאַטן אַריבערפירן צווישן די בעל מיטל און די שקלאַף מיטל. I2C איז אָד רעזולטאַט, רובֿ פון I2C זענען 2-דראָט (זייגער און דאַטן), בכלל געניצט צו יבערשיקן קאָנטראָל סיגנאַלז.
I2C איז אַ מולטי-בעל ויטאָבוס, אַזוי קיין מיטל קענען אַרבעטן ווי אַ בעל און קאָנטראָלירן די ויטאָבוס. יעדער מיטל אויף די ויטאָבוס האט אַ יינציק אַדרעס, און לויט זייער אייגענע קייפּאַבילאַטיז, זיי קענען אַרבעטן ווי טראַנסמיטער אָדער ריסיווערז. קייפל מיקראָ קאַנטראָולערז קענען קאָויגז אויף דער זעלביקער I2C ויטאָבוס.
3. ואַרט
ואַרט: וניווערסאַל ייסינגקראַנאַס סיריאַל פּאָרט, גאַנץ צוויי-וועג קאָמוניקאַציע לויט נאָרמאַל באָד קורס, פּאַמעלעך גיכקייַט.
די UART ויטאָבוס איז אַ ייסינגקראַנאַס סיריאַל פּאָרט, אַזוי עס איז בכלל פיל מער קאָמפּליצירט ווי די ערשטע צוויי סינטשראָנאָוס סיריאַל פּאָרץ. בכלל, עס באשטייט פון אַ באָד קורס גענעראַטאָר (די דזשענערייטאַד באָד קורס איז גלייַך צו 16 מאל די טראַנסמיסיע באָד קורס), UART ופנעמער און UART טראַנסמיטער. עס באשטייט פון צוויי ווירעס אין ייַזנוואַרג, איינער פֿאַר שיקן און איינער פֿאַר ריסיווינג.
UART איז אַ שפּאָן געניצט צו קאָנטראָלירן קאָמפּיוטערס און סיריאַל דעוויסעס. איין זאַך צו באַמערקן איז אַז עס אָפפערס אַן RS-232C דאַטן וואָקזאַל מיטל צובינד אַזוי אַז די קאָמפּיוטער קענען יבערגעבן מיט מאָדעמס אָדער אנדערע סיריאַל דעוויסעס וואָס נוצן די RS-232C צובינד. ווי טייל פון די צובינד, UART אָפפערס די פאלגענדע פאַנגקשאַנז:
די פּאַראַלעל דאַטן טראַנסמיטטעד פֿון די קאָמפּיוטער איז קאָנווערטעד אין די פּראָדוקציע סיריאַל דאַטן טייַך. קאָנווערט סיריאַל דאַטן פון אַרויס די קאָמפּיוטער אין ביטעס פֿאַר דעוויסעס וואָס נוצן פּאַראַלעל דאַטן אין די קאָמפּיוטער. לייג אַ פּאַריטעט ביסל צו די פּראָדוקציע סיריאַל דאַטן טייַך און דורכפירן אַ פּאַריטעט קאָנטראָל פון די דאַטן טייַך באקומען פון די אַרויס. לייג די אָנהייב-האַלטן צייכן צו די פּראָדוקציע דאַטן טייַך, און ויסמעקן די אָנהייב-האַלטן צייכן פון די באקומען דאַטן טייַך. שעפּן די יבעררייַסן סיגנאַל געשיקט דורך די קלאַוויאַטור אָדער מויז (קלאַוויאַטור און מויז זענען אויך סיריאַל דעוויסעס). קענען פירן די סינגקראַנאַזיישאַן פאַרוואַלטונג פּראָבלעם פון די קאָמפּיוטער און די פונדרויסנדיק סיריאַל מיטל. עטלעכע הויך-סוף UARTs אויך צושטעלן באַפערז פֿאַר ינפּוט און רעזולטאַט דאַטן. דער נייַער UART איז 16550, וואָס קענען קראָם 16 בייט דאַטן אין די באַפער איידער די קאָמפּיוטער דאַרף צו פּראָצעס די דאַטן. די געוויינטלעך UART איז 8250. איצט אויב איר קויפן אַ געבויט-אין מאָדעם, עס יוזשאַוואַלי וועט זיין אַ 16550 UART ין דער מאָדעם.
3. פאַרגלייַך פון SPI, I2C און UART
ביידע SPI און I2C קאָמוניקאַציע מעטהאָדס זענען קורץ-ווייַטקייט קאָמוניקאַציע צווישן די שפּאָן און די שפּאָן אָדער צווישן אנדערע קאַמפּאָונאַנץ אַזאַ ווי די סענסער און די שפּאָן. ספּי און ייק זענען ברעט-צו-ברעט קאָמוניקאַציע, ייק מאל אויך ברעט-צו-ברעט קאָמוניקאַציע, אָבער די ווייַטקייט איז זייער קורץ, אָבער מער ווי איין מעטער, למשל, עטלעכע פאַרבינדן סקרינז, מאָביל טעלעפאָן לקד סקרינז, פילע דין פילם קייבאַלז נוצן ייק, I2C קענען ווערן געניצט צו פאַרבייַטן נאָרמאַל פּאַראַלעל ויטאָבוס, פאַרשידן ינאַגרייטיד סערקאַץ און פאַנגקשאַנאַל מאַדזשולז וואָס קענען זיין פארבונדן. I2C איז אַ מולטי-בעל ויטאָבוס, אַזוי קיין מיטל קענען אַרבעטן ווי אַ בעל און קאָנטראָלירן די ויטאָבוס. יעדער מיטל אויף די ויטאָבוס האט אַ יינציק אַדרעס, און לויט זייער אייגענע קייפּאַבילאַטיז, זיי קענען אַרבעטן ווי טראַנסמיטער אָדער ריסיווערז. קייפל מיקראָ קאַנטראָולערז קענען קאָויגז אויף דער זעלביקער I2C ויטאָבוס. די צוויי שורות געהערן צו נידעריק-גיכקייַט טראַנסמיסיע.
די UART איז געניצט אין דער קאָמוניקאַציע צווישן צוויי דעוויסעס, אַזאַ ווי די קאָמוניקאַציע צווישן אַ מיטל און אַ קאָמפּיוטער געמאכט מיט אַ איין-שפּאָן מייקראָוקאַמפּיוטער. אַזאַ קאָמוניקאַציע קענען זיין דורכגעקאָכט איבער לאַנג דיסטאַנסאַז. די UART גיכקייַט איז פאַסטער ווי די צוויי אויבן, אַרויף צו וועגן 100 ק. עס איז געניצט צו יבערגעבן מיט די קאָמפּיוטער און די מיטל אָדער צווישן די קאָמפּיוטער און די כעזשבן, אָבער די עפעקטיוו קייט וועט נישט זיין זייער לאַנג, וועגן 10 מעטער. די מייַלע פון די UART איז אַז עס האט אַ ברייט קייט פון שטיצן און אַ פּראָגראַם פּלאַן סטרוקטור. גאַנץ פשוט, מיט דער אַנטוויקלונג פון וסב, UART איז ביסלעכווייַז דאַונכיל.
5. י 2 ס
I2S (Inter-IC Sound Bus) איז אַ ויטאָבוס סטאַנדאַרט דעוועלאָפּעד דורך Philips פֿאַר אַודיאָ דאַטן טראַנסמיסיע צווישן דיגיטאַל אַודיאָ דעוויסעס. רובֿ פון עס איז 3-דראָט (אין אַדישאַן צו זייגער און דאַטן, עס איז אויך אַ לינקס און רעכט קאַנאַל סעלעקציע סיגנאַל), I2S איז דער הויפּט געניצט צו יבערשיקן אַודיאָ סיגנאַלז. אַזאַ ווי STB, DVD, MP3, עטק.

אין די I2S נאָרמאַל, די ספּעציפיצירונג פון די ייַזנוואַרג צובינד און די פֿאָרמאַט פון דיגיטאַל אַודיאָ דאַטן זענען ספּעציפיצירט. I2S האט 3 הויפּט סיגנאַלז: 1) סיריאַל זייגער SCLK, אויך גערופן ביסל זייגער (BCLK), דאָס איז, קאָראַספּאַנדינג צו יעדער ביסל פון דיגיטאַל אַודיאָ דאַטן, SCLK האט 1 דויפעק. די אָפטקייַט פון SCLK = 2 × מוסטערונג אָפטקייַט × נומער פון מוסטערונג ביטן. 2) די ראַם זייגער LRCK, (אויך גערופן WS), איז געניצט צו באַשטימען די דאַטן פון די לינקס און רעכט טשאַנאַלז. LRCK פון "1" מיינען אַז די דאַטן פון די לינקס קאַנאַל זענען טראַנסמיטטעד, און "0" מיטל אַז די דאַטן פון די רעכט קאַנאַל זענען טראַנסמיטטעד. די אָפטקייַט פון LRCK איז גלייַך צו די מוסטערונג אָפטקייַט. 3) די סיריאַל דאַטן סדאַטאַ איז די אַודיאָ דאַטן אויסגעדריקט אין צוויי-דערגאַנג. אין סדר צו בעסער סינגקראַנייז די סיסטעמען, עס דאַרף זיין טראַנסמיטטעד אן אנדער סיגנאַל MCLK, גערופֿן די בעל זייגער, אויך גערופן די סיסטעם זייגער (Sys זייגער), וואָס איז 256 מאָל אָדער 384 מאל די מוסטערונג אָפטקייַט.
6. גפּיאָ
GPIO (אַלגעמיינע ציל ינפּוט אָוטפּוט) אָדער ויטאָבוס יקספּאַנדערז, ניצן ינדאַסטרי סטאַנדאַרט I2C, SMBus אָדער SPI צובינד צו פאַרפּאָשעטערן די יקספּאַנשאַן פון איך / אָ פּאָרץ.
ווען די מיקראָקאָנטראָללער אָדער טשיפּסעט נישט האָבן גענוג י / אָ פּאָרץ, אָדער ווען די סיסטעם דאַרף נוצן סיריאַל קאָמוניקאַציע אָדער קאָנטראָל, GPIO פּראָדוקטן קענען צושטעלן נאָך קאָנטראָל און מאָניטאָרינג פאַנגקשאַנז. יעדער GPIO פּאָרט קענען זיין קאַנפיגיערד ווי ינפּוט אָדער רעזולטאַט דורך ווייכווארג. די GPIO פּראָדוקט ליניע פון Maxim כולל 8-פּאָרט צו 28-פּאָרט GPIO, פּראַוויידינג פּוש-ציען רעזולטאַט אָדער אָפן-פליסן רעזולטאַט. בנימצא אין אַ מיניאַטורע 3 מם רענטגענ 3 מם קפן פּעקל.
(1) די אַדוואַנטידזשיז פון GPIO (פּאָרט יקספּאַנדערז):
נידעריק מאַכט קאַנסאַמשאַן: GPIO האט אַ נידעריק מאַכט קאַנסאַמשאַן (וועגן 1μ אַ, בשעת די ארבעטן קראַנט פון μ ק איז 100 μ אַ).
② ינטעגראַטעד ייק שקלאַף צובינד: גפּיאָ געבויט-אין ייק שקלאַף צובינד, עס קענען אַרבעטן אין פול גיכקייַט אפילו אין סטאַנדביי מאָדע.
③ קליין פּעקל: GPIO דעוויסעס צושטעלן די סמאָלאַסט פּעקל גרייס -3 מם רענטגענ 3 מם קפן!
④ נידעריק פּרייַז: איר טאָן ניט האָבן צו באַצאָלן פֿאַר אַניוזד פאַנגקשאַנז!
⑤ שנעל ליסטינג: ניט דאַרפֿן צו שרייַבן נאָך קאָודז, דאָקומענטן און קיין וישאַלט אַרבעט!
פלעקסאַבאַל לייטינג קאָנטראָל: געבויט-אין קייפל הויך-האַכלאָטע פּוום אַוטפּוץ.
⑥ פּרידיטערמינאַבאַל ענטפער צייט: פאַרקירצן אָדער באַשליסן די ענטפער צייט צווישן פונדרויסנדיק געשעענישן און ינטעראַפּץ.
בעסער לייטינג ווירקונג: מאַטשט קראַנט רעזולטאַט צו ענשור מונדיר אַרויסווייַזן ברייטנאַס.
W פּשוט וויירינג: בלויז 2 IIC בוסעס אָדער 3 SPI בוסעס זענען פארלאנגט
7. SDIO
SDIO איז אַן SD-יקספּאַנשאַן צובינד. אין אַדישאַן צו זיין פארבונדן צו אַ סד קאָרט, עס קען אויך זיין פארבונדן צו דעוויסעס וואָס שטיצן די SDIO צובינד. דער ציל פון די כאָלעל איז נישט בלויז צו שטעלן אַ זיקאָרן קאָרט. פּדאַס און לאַפּטאַפּס וואָס שטיצן די SDIO צובינד קענען זיין פארבונדן צו גפּס ראַסיווערז, וויפי אָדער בלועטאָאָטה אַדאַפּטערז, מאָדעמס, לאַן אַדאַפּטערז, באַרקאָדע לייענער, FM ראַדיאָס, טעלעוויזיע ריסיווערז, ראַדיאָ אָפטקייַט אָטענטאַקיישאַן לייענער, אָדער דיגיטאַל קאַמעראַס און אנדערע דעוויסעס וואָס נוצן SD. נאָרמאַל ינטערפייסיז.
די SDIO פּראָטאָקאָל איז יוואַלווד און אַפּגריידיד פֿון די SD פּראָטאָקאָל. פילע ערטער האַלטן די לייענען און שרייַבן פּראָטאָקאָל פון די סד קאָרט. אין דער זעלביקער צייט, די SDIO פּראָטאָקאָל מוסיף די CMD52 און CMD53 קאַמאַנדז צו די SD קאָרט פּראָטאָקאָל. צוליב דעם, אַ וויכטיק חילוק צווישן SDIO און SD קאָרט ספּעסאַפאַקיישאַנז איז די דערצו פון נידעריק-גיכקייַט סטאַנדאַרדס. די ציל אַפּלאַקיישאַן פון נידעריק-גיכקייַט קאַרדס סטאַרץ מיט דער קלענסטער ייַזנוואַרג צו שטיצן נידעריק-גיכקייַט י / אָ קייפּאַבילאַטיז. נידעריק-גיכקייַט קאַרדס שטיצן אַפּלאַקיישאַנז אַזאַ ווי מאָדעמס, באַרקאָדע סקאַנערז און גפּס ראַסיווערז. הויך-גיכקייַט קאַרדס שטיצן נעץ קאַרדס, טעלעוויזיע קאַרדס און "קאָמבאָ" קאַרדס, אאז"ו ו. קאָמבינאַציע קאַרדס אָפּשיקן צו זכּרון + SDIO.
אן אנדער וויכטיק חילוק צווישן SDIO און SD Card SPEC איז די אַדישאַן פון נידעריק-גיכקייַט סטאַנדאַרדס. SDIO קאָרט דאַרף בלויז ספּי און 1-ביסל סד טראַנסמיסיע מאָדע. די ציל אַפּלאַקיישאַן פון נידעריק-גיכקייַט קאַרדס איז צו שטיצן I / O קייפּאַבילאַטיז מיט מינימאַל ייַזנוואַרג ויסגאַבע. נידעריק-גיכקייַט קאַרדס שטיצן אַפּלאַקיישאַנז אַזאַ ווי מאָדעמס, באַר סקאַנערז און גפּס ראַסיווערז. פֿאַר קאָמבינאַציע קאַרדס, פול גיכקייַט און 4BIT אָפּעראַציע זענען פארלאנגט פֿאַר די ינערלעך זכּרון און SDIO טייל פון די קאָרט. אין ניט-קאַמביינד SDIO דעוויסעס, די מאַקסימום גיכקייט דאַרף בלויז דערגרייכן 25 ם און די מאַקסימום גיכקייט פון די קאַמביינד קאָרט איז די זעלבע ווי די מאַקסימום גיכקייַט פון די סד קאָרט וואָס איז העכער ווי 25 ם.
8. קענען
CAN, די פול נאָמען איז "קאָנטראָללער שטח נעטוואָרק", דאָס איז די קאָנטראָללער שטח נעטוואָרק, וואָס איז איינער פון די מערסט וויידלי געוויינט פעלד בוסעס אין דער וועלט. טכילעס, CAN איז געווען דיזיינד ווי אַ מיקראָקאָנטראָללער קאָמוניקאַציע אין די אָטאַמאָוטיוו סוויווע, יקסטשיינדזשינג אינפֿאָרמאַציע צווישן די פאַרשידן עלעקטראָניש קאָנטראָל דעוויסעס עקו אין די פאָרמיטל, און געשאפן אַן אָטאַמאָוטיוו עלעקטראָניש קאָנטראָל נעץ. פֿאַר בייַשפּיל, CAN קאָנטראָל דעוויסעס זענען עמבעדיד אין מאָטאָר פאַרוואַלטונג סיסטעמען, טראַנסמיסיע קאַנטראָולערז, ינסטראַמענטיישאַן ויסריכט און עלעקטראָניש באַקבאָון סיסטעמען.
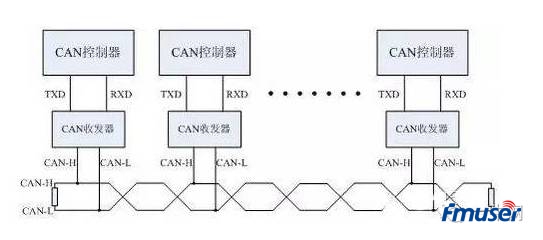
אין טעאָריע, אין איין נעץ קאַמפּאָוזד פון CAN ויטאָבוס, קאַונטלאַס נאָודז קענען זיין פארבונדן. אין פּראַקטיש אַפּלאַקיישאַנז, די נומער פון נאָודז איז לימיטעד דורך די עלעקטריקאַל קעראַקטעריסטיקס פון די נעץ ייַזנוואַרג. למשל, ווען מען ניצט Philips P82C250 ווי אַ CAN טראַנססעיווער, 110 נאָדעס זענען ערלויבט צו זיין פארבונדן אין דער זעלביקער נעץ. CAN קענען צושטעלן אַרויף צו 1 מביט / s דאַטן טראַנסמיסיע קורס, וואָס מאכט פאַקטיש-צייט קאָנטראָל זייער גרינג. אין אַדישאַן, די טעות וועראַפאַקיישאַן פון די ייַזנוואַרג ימפּרוווז די פיייקייט פון CAN צו אַנטקעגנשטעלנ ילעקטראָומאַגנעטיק ינטערפיראַנס.
פֿעיִקייטן פון CAN ויטאָבוס:
1) עס קענען אַרבעטן אין אַ מולטי-בעל מאָדע. קיין נאָדע אויף דער נעץ קענען אַקטיוולי שיקן אינפֿאָרמאַציע צו אנדערע נאָודז אויף די נעץ אין קיין צייט, ראַגאַרדלאַס פון בעל און שקלאַף, און די קאָמוניקאַציע מאָדע איז פלעקסאַבאַל.
2) די נאָודז אויף די נעץ קענען זיין צעטיילט אין פאַרשידענע פּרייאָראַטיז צו טרעפן פאַרשידענע פאַקטיש-צייט באדערפענישן.
3) א ניט-דעסטרוקטיווע ביסל אַרביטריישאַן ויטאָבוס סטרוקטור מעקאַניזאַם איז אנגענומען. ווען צוויי נאָודז יבערשיקן אינפֿאָרמאַציע צו די נעץ אין דער זעלביקער צייט, די נאָדע מיט נידעריקער בילכערקייַט אַקטיוולי סטאַפּס דאַטן טראַנסמיסיע, בשעת די נאָדע מיט העכער בילכערקייַט קענען פאָרזעצן צו יבערשיקן דאַטן אָן אַפעקטאַד.
4) דאַטן קענען זיין באקומען אין עטלעכע טראַנסמיסיע מאָדעס: פונט-צו-פונט, פונט-צו-מולטיפּאָינט און גלאבאלע בראָדקאַסט.
5) די מאַקסימום דירעקט קאָמוניקאַציע ווייַטקייט קענען דערגרייכן 10 קילאמעטער (גיכקייַט ונטער 4Kbps).
6) די קאָמוניקאַציע קורס קענען דערגרייכן אַרויף צו 1 מב / s (די לאָנגעסט ווייַטקייט איז 40 ם אין דעם צייַט).



|
|
|
|
ווי ווייַט (לאַנג) די טראַנסמיטער דעקן?
די טראַנסמיסיע קייט דעפּענדס אויף פילע סיבות. דער אמת דיסטאַנסע איז באזירט אויף די אַנטענע ינסטאָלינג הייך, אַנטענע געווינען, ניצן סוויווע ווי בנין און אנדערע אַבסטראַקשאַנז, סענסיטיוויטי פון די ופנעמער, אַנטענע פון די ופנעמער. ינסטאָלינג אַנטענע מער הויך און ניצן אין דער קאַנטריסייד, די דיסטאַנסע וועט פיל מער ווייַט.
בייַשפּיל קסנומקסוו FM טראַנסמיטער נוצן אין די שטאָט און כאָומטאַון:
איך האָבן אַ USA קונה נוצן קסנומקסוו FM טראַנסמיטער מיט גפּ אַנטענע אין זייַן כאָומטאַון, און ער פּרובירן עס מיט אַ מאַשין, עס דעקן קסנומקסקם (קסנומקסמילע).
איך פּרובירן די קסנומקסוו FM טראַנסמיטער מיט גפּ אַנטענע אין מיין כאָומטאַון, עס דעקן וועגן קסנומקסקם (קסנומקסמילע).
איך פּרובירן די קסנומקסוו FM טראַנסמיטער מיט גפּ אַנטענע אין גואַנגזשאָו שטאָט, עס דעקן וועגן בלויז קסנומקסמעטער (קסנומקספט).
ונטער זענען די דערנענטערנ זיך קייט פון פאַרשידענע מאַכט FM טראַנסמיטערז. (די קייט איז דיאַמעטער)
קסנומקסוו ~ קסנומקסוו FM טראַנסמיטער: קסנומקסם ~ קסנומקסקם
קסנומקסוו ~ קסנומקסוו FM טטראַנסמיטטער: קסנומקסקם ~ קסנומקסקם
קסנומקסוו ~ קסנומקסוו FM טראַנסמיטער: קסנומקסקם ~ קסנומקסקם
קסנומקסוו ~ קסנומקסוו FM טראַנסמיטער: קסנומקסקם ~ קסנומקסקם
קסנומקסוו ~ קסנומקסוו FM טראַנסמיטער: קסנומקסקם ~ קסנומקסקם
קסנומקסקוו ~ קסנומקסקוו FM טראַנסמיטער: קסנומקסקם ~ קסנומקסקם
קסנומקסקוו ~ קסנומקסקוו FM טראַנסמיטער: קסנומקסקם ~ קסנומקסקם
קסנומקסקוו ~ קסנומקסקוו FM טראַנסמיטער: קסנומקסקם ~ קסנומקסקם
ווי צו קאָנטאַקט אונדז פֿאַר די טראַנסמיטער?
רופן מיר + קסנומקס אָדער
בליצפּאָסט מיר [אימעיל באשיצט]
1.How ווייַט איר ווילן צו דעקן אין דיאַמעטער?
קסנומקס.האָוו הויך פון איר טורעם?
קסנומקס.ווהערע ביסט איר פון?
און מיר וועט געבן איר מער פאַכמאַן עצה.
וועגן אונז
FMUSER.ORG איז אַ סיסטעם ינטאַגריישאַן פירמע פאָוקיסינג אויף רף וויירליס טראַנסמיסיע / סטודיאָ ווידעא אַודיאָ עקוויפּמענט / סטרימינג און דאַטן פּראַסעסינג. מיר צושטעלן אַלץ פון עצה און קאַנסאַלטאַנסי דורך געשטעל ינאַגריישאַן צו ינסטאַלירונג, קאַמישאַנינג און טריינינג.
מיר פאָרשלאָגן עפעם טראַנסמיטער, אַנאַלאָג טעלעוויזיע טראַנסמיטער, דיגיטאַל טעלעוויזיע טראַנסמיטער, ווהף והף טראַנסמיטער, אַנטענאַז, קאָואַקסיאַל קאַבלע קאַנעקטערז, סטל, אויף לופט פּראַסעסינג, בראָאַדקאַסט פּראָדוקץ פֿאַר די סטודיאָ, רף סיגנאַל מאָניטאָרינג, רדס ענקאָדערס, אַודיאָ פּראַסעסערז און ווייַט פּלאַץ קאָנטראָל וניץ, יפּקט פּראָדוקטן, ווידעא / אַודיאָ ענקאָדער / דעקאָדער, דיזיינד צו טרעפן די באדערפענישן פון ביידע גרויס אינטערנאַציאָנאַלער בראָדקאַסט נעטוואָרקס און קליין פּריוואַט סטיישאַנז.
אונדזער לייזונג האט FM ראַדיאָ סטאַנציע / אַנאַלאָג טעלעוויזיע סטיישאַן / דיגיטאַל טעלעוויזיע סטאַנציע / אַודיאָ ווידעא סטודיאָ עקוויפּמענט / סטודיאָ טראַנסמיטער לינק / טראַנסמיטער טעלעמעטרי סיסטעם / האָטעל טעלעוויזיע סיסטעם / יפּטוו לייוו בראָדקאַסטינג / סטרימינג לייוו בראָדקאַסט / ווידעא קאָנפֿערענץ / קאַטוו בראָדקאַסטינג סיסטעם
מיר נוצן אַוואַנסירטע טעכנאָלאָגיע פּראָדוקטן פֿאַר אַלע די סיסטעמען, ווייַל מיר וויסן די הויך רילייאַבילאַטי און הויך פאָרשטעלונג איז אַזוי וויכטיק פֿאַר די סיסטעם און לייזונג. אין דער זעלביקער צייַט מיר אויך האָבן צו מאַכן זיכער אונדזער פּראָדוקטן סיסטעם מיט אַ זייער גלייַך פּרייַז.
מיר האָבן קאַסטאַמערז פון עפנטלעך און געשעפט בראָדקאַסטערז, טעלאַקאַמי אָפּערייטערז און רעגולירן אויטאריטעטן, און מיר אויך פאָרשלאָגן לייזונג און פּראָדוקטן צו פילע הונדערטער פון קליין, היגע און קהל בראָדקאַסטערז.
FMUSER.ORG איז יקספּאָרטאַד מער ווי 15 יאר און האט קלייאַנץ איבער די וועלט. מיט 13 יאָר דערפאַרונג אין דעם פעלד, מיר האָבן אַ פאַכמאַן מאַנשאַפֿט צו סאָלווע קונה ס אַלע מינים פון פּראָבלעמס. מיר דעדאַקייטאַד אין סאַפּלייינג די גאָר גלייַך פּרייסינג פון פאַכמאַן פּראָדוקטן & באַדינונגס. קאָנטאַקט email: [אימעיל באשיצט]
אונדזער פֿאַבריק

מיר האבן מאָדערניזירונג פון די פאַבריק. איר זענט באַגריסונג צו באַזוכן אונדזער פאַבריק ווען איר קומען צו טשיינאַ.

יצט, עס זענען שוין קסנומקס קאַסטאַמערז אַרום דער וועלט באזוכט אונדזער גואַנגזשאָו טיאַנהע אָפיס. אויב איר קומען צו טשיינאַ, איר זענט באַגריסן צו באַזוכן אונדז.
אין שיין

דאס איז אונדזער אָנטייל אין קסנומקס גלאבאלע סאָורסעס האָנג קאָנג עלעקטראָניקס שיין . קוסטאָמערס פון אַלע איבער די וועלט לעסאָף האָבן אַ געלעגנהייַט צו באַקומען צוזאַמען.
ווו איז פמוסער?

איר קענט זוכן די נומערן " 23.127460034623816,113.33224654197693 "אין Google מאַפּע, איר קענט געפֿינען אונדזער פמוסער אָפיס.
פמוסער גואַנגזשאָו אָפיס איז אין טיאַנהע דיסטריקט וואָס איז די צענטער פון די קאַנטאָן . זייער לעבן צו די קאַנטאָן שיין , גואַנגזשאָו באַן סטאַנציע, קסיאַאָבעי וועג און דאַשאַטאָו , נאָר דאַרפֿן קסנומקס מינוט אויב נעמען טאַקסי . ברוכים הבאים Friends אַרום דער וועלט צו באַזוכן און פאַרהאַנדלען.
קאָנטאַקט: הימל בלוי
Cellphone: + קסנומקס
ווהאַצאַפּפּ: + קסנומקס
וועהאַט: + קסנומקס
E- פּאָסט: [אימעיל באשיצט]
קק: קסנומקס
סקיפּע: סקיקסנומקס
אַדרעס: נאָ.קסנומקס רום הוילאַן בילדינג נאָ.קסנומקס הואַנפּו וועג גואַנגזשאָו טשיינאַ זיפּ: קסנומקס
|
|
|
|
ענגליש: מיר אָננעמען אַלע פּיימאַנץ, אַזאַ ווי PayPal, קרעדיט קאַרטל, Western Union, Alipay, Money Bookers, T / T, LC, DP, DA, OA, Payoneer, אויב איר האָט קיין קשיא, ביטע קאָנטאַקט מיר [אימעיל באשיצט] אָדער WhatsApp + 8618078869184
-
PayPal.  www.paypal.com www.paypal.com
מיר רעקאָמענדירן איר נוצן Paypal צו קויפן אונדזער זאכן, די Paypal איז אַ זיכער וועג צו קויפן אויף אינטערנעט.
יעדער פון אונדזער נומער רשימה בלאַט דנאָ אויף שפּיץ האָבן אַ PayPal לאָגאָ צו באַצאָלן.
קרעדיט קארטל.אויב איר טאָן ניט האָבן PayPal, אָבער איר האָבן קרעדיט קאָרט, איר אויך קענען גיט די Yellow PayPal קנעפּל צו באַצאָלן מיט דיין קרעדיט קאָרט.
-------------------------------------------------- -------------------
אבער אויב איר האָבן נישט אַ קרעדיט קאָרט און נישט האָבן אַ PayPal חשבון אָדער שווער צו גאַט אַ PayPal אַקקאָוט, איר קענען נוצן די ווייַטערדיק:
וועסטערן יוניון.  www.westernunion.com www.westernunion.com
באַצאָלן דורך מערב יוניאַן צו מיר:
ערשטער נאָמען / געגעבן נאָמען: יינגפענג
לעצטע נאָמען / Surname / משפּחה נאָמען: זשאַנג
גאַנץ נאָמען: יינגפענג זשאַנג
לאַנד: טשיינאַ
שטאָט: גואַנגזשאָו
|
-------------------------------------------------- -------------------
ג / ה. באַצאָלן דורך ג / ה (דראָט אַריבערפירן / טעלעגראַפיק פֿאַרוואַנדלער / באַנק אַריבערברענגען)
ערשטער באַנק אינפֿאָרמאַציע (פירמע אַקאַונט):
SWIFT BIC: BKCHHKHHXXX
באַנק נאָמען: באַנק פון טשיינאַ (האָנג קאָנג) באגרעניצט, האָנג קאָנג
באַנק אַדרעס: באַנק פון טשיינאַ טורעם, קסנומקס גאַרדאַן וועג, הויפט, האָנג קאָנג
באַנק CODE: קסנומקס
נאָמען: FMUSER INTERNATIONAL GROUP LIMITED
חשבון NO. : 012-676-2-007855-0
-------------------------------------------------- -------------------
צווייטע באַנק אינפֿאָרמאַציע (פירמע אַקאַונט):
בענאַפישיערי: Fmuser International Group Inc.
Account Number: 44050158090900000337
בענאַפישיערי באַנק: טשיינאַ קאַנסטראַקשאַן באַנק גואַנגדאָנג בראַנטש
SWIFT קאָד: PCBCCNBJGDX
אַדרעס: NO.553 טיאַנהע ראָוד, גואַנגזשאָו, גואַנגדאָנג, טיאַנהע דיסטריקט, טשיינאַ
** באַמערקונג: אויב איר אַריבערפירן געלט צו אונדזער באַנק אקאונט, ביטע טאָן ניט שרייַבן עפּעס אין די באַמערקונג געגנט, אַנדערש מיר וועלן נישט קענען צו באַקומען די צאָלונג רעכט צו רעגירונג פּאָליטיק פֿאַר אינטערנאציאנאלע האַנדל געשעפט.
|
|
|
|
* עס וועט זייַן געשיקט אין קסנומקס-קסנומקס ארבעטן טעג ווען צאָלונג קלאָר.
* מיר וועלן שיקן עס צו דיין PayPal אַדרעס. אויב איר ווילן צו טוישן אַדרעס, ביטע שיקן דיין ריכטיק אַדרעס און טעלעפאָנירן נומער צו מיין אימעיל [אימעיל באשיצט]
* אויב די פּאַקאַדזשאַז איז ווייטער קסנומקסקג, מיר וועלן זייַן שיפּט דורך פּאָסטן לופטפּאָסט, עס וועט נעמען וועגן קסנומקס-קסנומקסדייַס צו דיין האַנט.
אויב דער פּעקל איז מער ווי קסנומקסקג, מיר וועלן שיף דורך עמס, דהל, אַפּס, Fedex שנעל אויסדריקן עקספּרעס, עס וועט נעמען וועגן קסנומקס ~ קסנומקסדייַס צו דיין האַנט.
אויב די פּעקל מער ווי קסנומקסקג, מיר וועלן שיקן דורך דהל אָדער לופט FREIGHT. עס וועט נעמען וועגן קסנומקס ~ קסנומקסדייַס צו דיין האַנט.
כל די פּאַקאַדזשאַז זענען פאָרעם טשיינאַ גואַנגזשאָו.
* פּעקל וועט ווערן געשיקט ווי אַ "טאַלאַנט" און דיסקלער ווי ווייניקער ווי מעגלעך, קוינע טאָן ניט דאַרפֿן צו צאָלן פֿאַר "שטייער".
* נאָך שיף, מיר וועלן שיקן איר אַ E- פּאָסט און געבן איר די טראַקינג נומער.
|
|
|
פֿאַר וואָראַנטי.
קאָנטאַקט אונדז --- >> צוריקקומען די נומער צו אונדז --- >> באַקומען און שיקן אן אנדער פאַרבייַטן.
נאָמען: ליו קסיאַאָקסיאַ
אַדרעס: קסנומקספאַנג הוילאַנגע הואַנגפּודאַדאַאָקסי קסנומקסהאַאָ טיאַנהעקוו גואַנגזשאָו טשיינאַ.
פּאָסטקאָד: קסנומקס
טעלעפאָנירן: + קסנומקס
ביטע צוריקקומען צו דעם אַדרעס און שרייַבן דיין PayPal אַדרעס, נאָמען, פּראָבלעם אויף טאָן: |
|
אונדזער אנדערע פּראָדוקט: